
项目介绍
下图中的两条线即为车道:
我们的任务就是通过 OpenCV 在一段视频(或摄像头)中实时检测出车道并将其标记出来。其效果如下图所示:

这里使用的代码来源于磐怼怼大神,此文章旨在对其代码进行解释。
实现步骤
1、将视频的所有帧读取为图片;
2、创建掩码并应用到这些图片上;
3、图像阈值化;
4、用霍夫线变换检测车道;
5、将车道画到每张图片上;
6、将所有图片合并为视频。
代码实现
1、导入需要的库
import os import re import cv2 import numpy as np from tqdm import notebook import matplotlib.pyplot as plt
其中 tqdm.notebook 是用来显示进度条的。
2、将图片(视频的每一帧)加载进来
这里我们已经将视频的每一帧读取为图片了,并将它们都放进 frames 文件夹。
# 获取帧的文件名
col_frames = os.listdir('frames/') # 读取 frames 文件夹下的所有图片
col_frames.sort(key=lambda f: int(re.sub('\D', '', f))) # 按名称对图片进行排序
# 加载帧
col_images=[]
for i in notebook.tqdm(col_frames):
img = cv2.imread('frames/'+i)
col_images.append(img) # 将所有图片添加进 col_images 列表
3、选择一张图片进行处理
3.1 选定一张图片
# 指定一个索引 idx = 457 # plot frame plt.figure(figsize=(10,10)) plt.imshow(col_images[idx][:,:,0], cmap= "gray") plt.show()

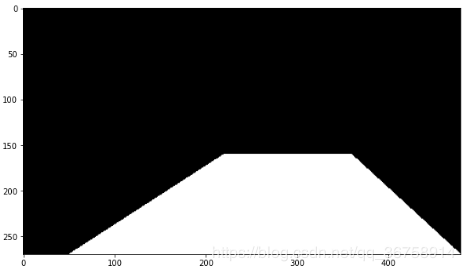
3.2 创建掩码
# 创建0矩阵 stencil = np.zeros_like(col_images[idx][:,:,0]) # 指定多边形的坐标 polygon = np.array([[50,270], [220,160], [360,160], [480,270]]) # 用1填充多边形 cv2.fillConvexPoly(stencil, polygon, 1) # 画出多边形 plt.figure(figsize=(10,10)) plt.imshow(stencil, cmap= "gray") plt.show()
3.3 将掩码应用到图片上
# 应用该多边形作为掩码 img = cv2.bitwise_and(col_images[idx][:,:,0], col_images[idx][:,:,0], mask=stencil) # 画出掩码后的图片 plt.figure(figsize=(10,10)) plt.imshow(img, cmap= "gray") plt.show()
这里的按位与操作 cv2.bitwise_and() 可以参考OpenCV 之按位运算举例解析一文。

3.4 图像阈值化
# 应用图像阈值化 ret, thresh = cv2.threshold(img, 130, 145, cv2.THRESH_BINARY) # 画出图像 plt.figure(figsize=(10,10)) plt.imshow(thresh, cmap= "gray") plt.show()
其中 cv2.threshold 函数的用法可以参考Opencv之图像阈值一文。

3.5 霍夫线变换检测车道
lines = cv2.HoughLinesP(thresh, 1.0, np.pi/180, 30, maxLineGap=200) # 创建原始帧的副本 dmy = col_images[idx][:,:,0].copy() # 霍夫线 for line in lines: x1, y1, x2, y2 = line[0] # 提取出霍夫线的坐标 cv2.line(dmy, (x1, y1), (x2, y2), (255, 0, 0), 3) # 将霍夫线画在帧上 # 画出帧 plt.figure(figsize=(10,10)) plt.imshow(dmy, cmap= "gray") plt.show()
cv2.HoughLinesP() 函数介绍:
lines = HoughLinesP(image, rho, theta, threshold, minLineLength=None, maxLineGap=None)
输入:
- image: 必须是二值图像;
- rho: 线段以像素为单位的距离精度,double类型的,推荐用1.0
- theta: 线段以弧度为单位的角度精度,推荐用numpy.pi/180
- threshod: 累加平面的阈值参数,int类型,超过设定阈值才被检测出线段,值越大,基本上意味着检出的线段越长,检出的线段个数越少。
- minLineLength:线段以像素为单位的最小长度。
- maxLineGap:同一方向上两条线段判定为一条线段的最大允许间隔,超过了设定值,则把两条线段当成一条线段。
输出:
lines:一个三维矩阵,其形状符合 (m, 1, n),其中 m 表示直线个数,n 表示每条直线的两端坐标。

4、对每张图片进行上一步骤的处理后写入视频
4.1 定义视频格式
# 输出视频路径 pathOut = 'roads_v2.mp4' # 视频每秒的帧数 fps = 30.0 # 视频中每一帧的尺寸 height, width = img.shape size = (width,height) # 写入视频 out = cv2.VideoWriter(pathOut,cv2.VideoWriter_fourcc(*'DIVX'), fps, size)
4.2 处理所有图片并写入视频文件
for img in notebook.tqdm(col_images):
# 应用帧掩码
masked = cv2.bitwise_and(img[:,:,0], img[:,:,0], mask=stencil)
# 应用图像阈值化
ret, thresh = cv2.threshold(masked, 130, 145, cv2.THRESH_BINARY)
# 应用霍夫线变换
lines = cv2.HoughLinesP(thresh, 1, np.pi/180, 30, maxLineGap=200)
dmy = img.copy()
#画出检测到的线
try:
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(dmy, (x1, y1), (x2, y2), (255, 0, 0), 3)
out.write(dmy)
except TypeError:
out.write(img)
out.release()
完整代码
import os
import re
import cv2
import numpy as np
from tqdm import notebook
import matplotlib.pyplot as plt
col_frames = os.listdir('frames/')
col_frames.sort(key=lambda f: int(re.sub('\D', '', f)))
col_images=[]
for i in notebook.tqdm(col_frames):
img = cv2.imread('frames/'+i)
col_images.append(img)
stencil = np.zeros_like(col_images[0][:,:,0])
polygon = np.array([[50,270], [220,160], [360,160], [480,270]])
cv2.fillConvexPoly(stencil, polygon, 1)
pathOut = 'roads_v2.mp4'
fps = 30.0
height, width = img.shape
size = (width,height)
out = cv2.VideoWriter(pathOut,cv2.VideoWriter_fourcc(*'DIVX'), fps, size)
for img in notebook.tqdm(col_images):
masked = cv2.bitwise_and(img[:,:,0], img[:,:,0], mask=stencil)
ret, thresh = cv2.threshold(masked, 130, 145, cv2.THRESH_BINARY)
lines = cv2.HoughLinesP(thresh, 1, np.pi/180, 30, maxLineGap=200)
dmy = img.copy()
try:
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(dmy, (x1, y1), (x2, y2), (255, 0, 0), 3)
out.write(dmy)
except TypeError:
out.write(img)
out.release()
到此这篇关于使用OpenCV对车道进行实时检测的实现示例代码的文章就介绍到这了,更多相关OpenCV 车道实时检测内容请搜索自学编程网以前的文章或继续浏览下面的相关文章希望大家以后多多支持自学编程网!

- 本文固定链接: https://zxbcw.cn/post/189066/
- 转载请注明:必须在正文中标注并保留原文链接
- QQ群: PHP高手阵营官方总群(344148542)
- QQ群: Yii2.0开发(304864863)