
1.颜色空间转换
使用cv2.cvtColor(input_image ,flag),flag为转换类型
常用的转换类型有:
- BGR和灰度图的转换使用 cv2.COLOR_BGR2GRAY
- BGR和HSV的转换使用 cv2.COLOR_BGR2HSV
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
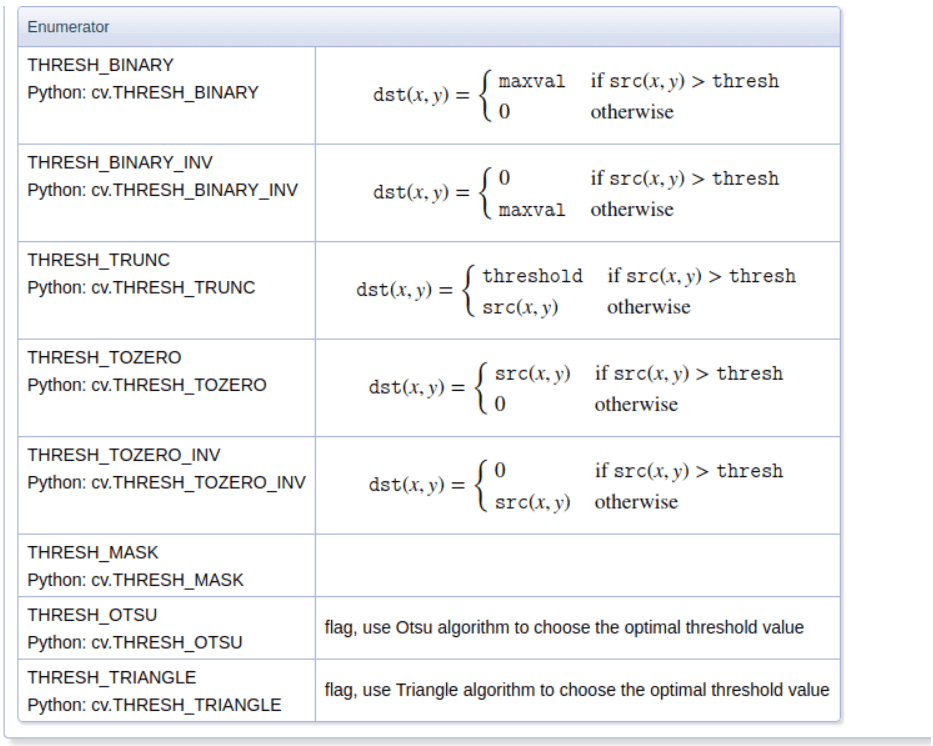
2.二值化
- ret, dst = cv2.threshold(src, thresh, maxval, type)
- src:表示的是图片源(灰度图)
- thresh:表示的是阈值(起始值)
- maxval:表示的是最大值
- type:表示的是这里划分的时候使用的是什么类型的算法,常用值为0(cv2.THRESH_BINARY)
返回值
ret:指定的thresh
dst: 目标图像
ret, dst = cv2.threshold(img_gray, 200, 255, cv2.THRESH_BINARY)
3.查找并绘制轮廓
3.1 cv2.findContours(image, mode, method[, offset])
概述:
寻找一个二值图像的轮廓。注意黑色表示背景,白色表示物体,即在黑色背景里寻找白色物体的轮廓
参数:
- image: 8位单通道图像。非零像素值视为1,所以图像视作二值图像
- mode: 轮廓检索的方式
- cv2.RETR_EXTERNAL: 只检索外部轮廓
- cv2.RETR_LIST: 检测所有轮廓且不建立层次结构
- cv2.RETR_CCOMP: 检测所有轮廓,建立两级层次结构。上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
- cv2.RETR_TREE: 检测所有轮廓,建立完整的层次结构
- method: 轮廓近似的方法
- cv2.CHAIN_APPROX_NONE: 存储所有的轮廓点
- cv2.CHAIN_APPROX_SIMPLE: 压缩水平,垂直和对角线段,只留下端点。 例如矩形轮廓可以用4个点编码
- cv2.CHAIN_APPROX_TC89_L1,cv2.CHAIN_APPROX_TC89_KCOS:使用Teh-Chini chain近似算法
- offset:(可选参数)轮廓点的偏移量,格式为tuple,如(-10,10)表示轮廓点沿X负方向偏移10个像素点,沿Y正方向偏移10个像素点
返回值:
- contours: 轮廓点。列表格式,每一个元素为一个3维数组(其形状为(n,1,2),其中n表示轮廓点个数,2表示像素点坐标),表示一个轮廓
- hierarchy: 轮廓间的层次关系,为三维数组,形状为(1,n,4),其中n表示轮廓总个数,4指的是用4个数表示各轮廓间的相互关系。第一个数表示同级轮廓的下一个轮廓编号,第二个数表示同级轮廓的上一个轮廓的编号,第三个数表示该轮廓下一级轮廓的编号,第四个数表示该轮廓的上一级轮廓的编号
补充: 若想得到轮廓点的集合的列表,可使用
cnt = np.squeeze(contours[0])
3.2 cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset]]]])
参数:
- image: 需要绘制轮廓的目标图像,注意会改变原图
- contours: 轮廓点,上述函数cv2.findContours()的第一个返回值
- contourIdx: 轮廓的索引,表示绘制第几个轮廓,-1表示绘制所有的轮廓
- color: 绘制轮廓的颜色
- thickness:(可选参数)轮廓线的宽度,-1表示填充
- lineType:(可选参数)轮廓线型,包括cv2.LINE_4,cv2.LINE_8(默认),cv2.LINE_AA,分别表示4邻域线,8领域线,抗锯齿线(可以更好地显示曲线)
- hierarchy:(可选参数)层级结构,上述函数cv2.findContours()的第二个返回值,配合maxLevel参数使用
- maxLevel:(可选参数)等于0表示只绘制指定的轮廓,等于1表示绘制指定轮廓及其下一级子轮廓,等于2表示绘制指定轮廓及其所有子轮廓
- offset:(可选参数)轮廓点的偏移量
import cv2
img = cv2.imread('D:/2.jpg',1)img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, dst = cv2.threshold(img_gray, 200, 255, cv2.THRESH_BINARY)contours,hierarchy = cv2.findContours(dst, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE)
cv2.drawContours(img, contours, -1, (0, 255, 0), 3)cv2.imshow('img',img)
cv2.waitKey(0)
4.点与轮廓位置关系
此功能可查找图像中的点与轮廓之间的最短距离。当点在轮廓外时返回负值,当点在内部时返回正值,如果点在轮廓上则返回零
dist = cv2.pointPolygonTest(cnt, (100, 100), True)
检查(100,100)与轮廓(cnt)的距离
在函数中,第二个参数需要tuple类型;第三个参数是measureDist。 如果为True,则查找距离. 如果为False,则查找该点是在内部还是外部或在轮廓上(它分别返回+1,-1,0)
如果不需要到距离,请确保第三个参数为False,因为这是一个耗时的过程。因此,将其设为False可提供2-3倍的加速
5.直线拟合fitline函数
output = cv2.fitLine(InputArray points, distType, param, reps, aeps)
参数:
- InputArray Points: 待拟合的直线的集合,必须是矩阵形式(如numpy.array)
- distType: 距离类型。fitline为距离最小化函数,拟合直线时,要使输入点到拟合直线的距离和最小化。这里的距离的类型有以下几种:
- cv2.DIST_USER : User defined distance
- cv2.DIST_L1: distance = |x1-x2| + |y1-y2|
- cv2.DIST_L2: 欧式距离,此时与最小二乘法相同
- cv2.DIST_C: distance = max(|x1-x2|,|y1-y2|)
- cv2.DIST_L12: L1-L2 metric: distance = 2(sqrt(1+x*x/2) - 1))
- cv2.DIST_FAIR
- cv2.DIST_WELSCH
- cv2.DIST_HUBER
- param: 距离参数,跟所选的距离类型有关,值可以设置为0
- reps,aeps: 第5/6个参数用于表示拟合直线所需要的径向和角度精度,通常情况下两个值均被设定为1e-2
返回值:
output:对于二维直线,输出output为4维,前两维代表拟合出的直线的方向,后两位代表直线上的一点。(即通常说的点斜式直线)
loc = np.array(loc)
output = cv2.fitLine(loc, cv2.DIST_L2, 0, 0.01, 0.01)
k = output[1] / output[0]
b = output[3] - k * output[2]#k[key]报错?
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持自学编程网。

- 本文固定链接: https://www.zxbcw.cn/post/194577/
- 转载请注明:必须在正文中标注并保留原文链接
- QQ群: PHP高手阵营官方总群(344148542)
- QQ群: Yii2.0开发(304864863)