
本文实例为大家分享了Opencv Python实现两幅图像匹配的具体代码,供大家参考,具体内容如下
原图
import cv2
img1 = cv2.imread('SURF_2.jpg', cv2.IMREAD_GRAYSCALE)
img1 = cv2.resize(img1,dsize=(600,400))
img2 = cv2.imread('SURF_1.jpg', cv2.IMREAD_GRAYSCALE)
img2 = cv2.resize(img2,dsize=(600,400))
image1 = img1.copy()
image2 = img2.copy()
#创建一个SURF对象
surf = cv2.xfeatures2d.SURF_create(25000)
#SIFT对象会使用Hessian算法检测关键点,并且对每个关键点周围的区域计算特征向量。该函数返回关键点的信息和描述符
keypoints1,descriptor1 = surf.detectAndCompute(image1,None)
keypoints2,descriptor2 = surf.detectAndCompute(image2,None)
# print('descriptor1:',descriptor1.shape(),'descriptor2',descriptor2.shape())
#在图像上绘制关键点
image1 = cv2.drawKeypoints(image=image1,keypoints = keypoints1,outImage=image1,color=(255,0,255),flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
image2 = cv2.drawKeypoints(image=image2,keypoints = keypoints2,outImage=image2,color=(255,0,255),flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
#显示图像
cv2.imshow('surf_keypoints1',image1)
cv2.imshow('surf_keypoints2',image2)
cv2.waitKey(20)
matcher = cv2.FlannBasedMatcher()
matchePoints = matcher.match(descriptor1,descriptor2)
# print(type(matchePoints),len(matchePoints),matchePoints[0])
#提取强匹配特征点
minMatch = 1
maxMatch = 0
for i in range(len(matchePoints)):
if minMatch > matchePoints[i].distance:
minMatch = matchePoints[i].distance
if maxMatch < matchePoints[i].distance:
maxMatch = matchePoints[i].distance
print('最佳匹配值是:',minMatch)
print('最差匹配值是:',maxMatch)
#获取排雷在前边的几个最优匹配结果
goodMatchePoints = []
for i in range(len(matchePoints)):
if matchePoints[i].distance < minMatch + (maxMatch-minMatch)/16:
goodMatchePoints.append(matchePoints[i])
#绘制最优匹配点
outImg = None
outImg = cv2.drawMatches(img1,keypoints1,img2,keypoints2,goodMatchePoints,outImg,
matchColor=(0,255,0),flags=cv2.DRAW_MATCHES_FLAGS_DEFAULT)
cv2.imshow('matche',outImg)
cv2.waitKey(0)
cv2.destroyAllWindows()

原图

#coding=utf-8
import cv2
from matplotlib import pyplot as plt
img=cv2.imread('xfeatures2d.SURF_create2.jpg',0)
# surf=cv2.SURF(400) #Hessian阈值400
# kp,des=surf.detectAndCompute(img,None)
# leng=len(kp)
# print(leng)
# 关键点太多,重取阈值
surf=cv2.cv2.xfeatures2d.SURF_create(50000) #Hessian阈值50000
kp,des=surf.detectAndCompute(img,None)
leng=len(kp)
print(leng)
img2=cv2.drawKeypoints(img,kp,None,(255,0,0),4)
plt.imshow(img2)
plt.show()
# 下面是U-SURF算法,关键点朝向一致,运算速度加快。
surf.upright=True
kp=surf.detect(img,None)
img3=cv2.drawKeypoints(img,kp,None,(255,0,0),4)
plt.imshow(img3)
plt.show()
#检测关键点描述符大小,改64维成128维
surf.extended=True
kp,des=surf.detectAndCompute(img,None)
dem1=surf.descriptorSize()
print(dem1)
shp1=des.shape()
print(shp1)
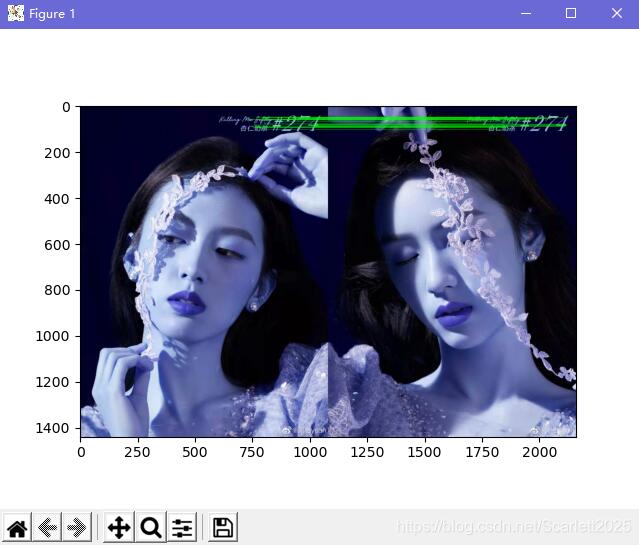
效果图
import cv2
from matplotlib import pyplot as plt
leftImage = cv2.imread('xfeatures2d.SURF_create_1.jpg')
rightImage = cv2.imread('xfeatures2d.SURF_create_2.jpg')
# 创造sift
sift = cv2.xfeatures2d.SIFT_create()
kp1, des1 = sift.detectAndCompute(leftImage, None)
kp2, des2 = sift.detectAndCompute(rightImage, None) # 返回关键点信息和描述符
FLANN_INDEX_KDTREE = 0
indexParams = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
searchParams = dict(checks=50) # 指定索引树要被遍历的次数
flann = cv2.FlannBasedMatcher(indexParams, searchParams)
matches = flann.knnMatch(des1, des2, k=2)
matchesMask = [[0, 0] for i in range(len(matches))]
print("matches", matches[0])
for i, (m, n) in enumerate(matches):
if m.distance < 0.07 * n.distance:
matchesMask[i] = [1, 0]
drawParams = dict(matchColor=(0, 255, 0), singlePointColor=None,
matchesMask=matchesMask, flags=2) # flag=2只画出匹配点,flag=0把所有的点都画出
resultImage = cv2.drawMatchesKnn(leftImage, kp1, rightImage, kp2, matches, None, **drawParams)
plt.imshow(resultImage)
plt.show()
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持自学编程网。

- 本文固定链接: https://zxbcw.cn/post/215620/
- 转载请注明:必须在正文中标注并保留原文链接
- QQ群: PHP高手阵营官方总群(344148542)
- QQ群: Yii2.0开发(304864863)