
2020
09-27
09-27
Python opencv相机标定实现原理及步骤详解
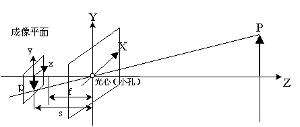 相机标定相机标定的目的获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像。相机标定的输入标定图像上所有内角点的图像坐标,标定板图像上所有内角点的空间三维坐标(一般情况下假定图像位于Z=0平面上)。相机标定的输出摄像机的内参、外参系数。拍摄的物体都处于三维世界坐标系中,而相机拍摄时镜头看到的是三维相机坐标系...
继续阅读 >
相机标定相机标定的目的获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像。相机标定的输入标定图像上所有内角点的图像坐标,标定板图像上所有内角点的空间三维坐标(一般情况下假定图像位于Z=0平面上)。相机标定的输出摄像机的内参、外参系数。拍摄的物体都处于三维世界坐标系中,而相机拍摄时镜头看到的是三维相机坐标系...
继续阅读 >