
2022
05-27
05-27
Python OpenCV实现边缘检测
 本文实例为大家分享了PythonOpenCV实现边缘检测的具体代码,供大家参考,具体内容如下1.Sobel算子检测Sobel算子是高斯平滑和微分运算的组合,抗噪能力很强,用途也很多,尤其是效率要求高但对细纹理不是很在意的时候。对于不连续的函数,有:假设要处理的图像为I,在两个方向求导。水平变化:用奇数大小的模板对图像I卷积,结果为Gx。例如,当模板大小为3时,Gx为: 垂直变化:用奇数大小的模板对图像I卷积,结果为Gy。例...
继续阅读 >
本文实例为大家分享了PythonOpenCV实现边缘检测的具体代码,供大家参考,具体内容如下1.Sobel算子检测Sobel算子是高斯平滑和微分运算的组合,抗噪能力很强,用途也很多,尤其是效率要求高但对细纹理不是很在意的时候。对于不连续的函数,有:假设要处理的图像为I,在两个方向求导。水平变化:用奇数大小的模板对图像I卷积,结果为Gx。例如,当模板大小为3时,Gx为: 垂直变化:用奇数大小的模板对图像I卷积,结果为Gy。例...
继续阅读 >
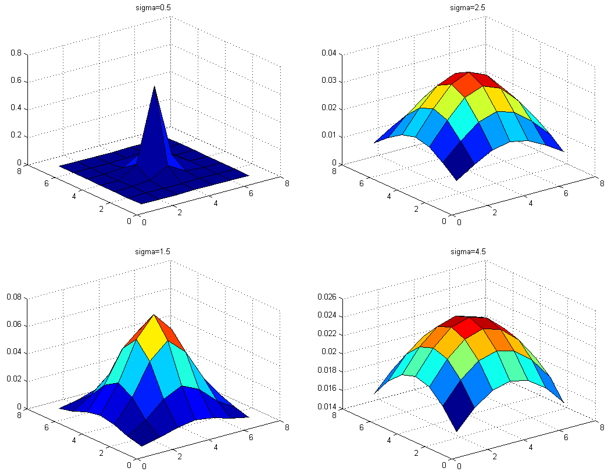 目录一、图像滤波1.1线性滤波器1.1.1均值滤波1.1.2高斯滤波1.2非线性滤波器1.2.1中值滤波器1.2.2双边滤波器1.3滤波器的Matlab代码实现二、图像边缘检测2.1一阶边缘检测算子2.1.1Sobel算子2.1.2Canny算子2.2二阶边缘检测算子2.2.1拉普拉斯算子2.3边缘检测的Matlab代码实现2.4边缘检测算法总结三、参考资料一、图像滤波图像滤波的主要目的就是在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制。图像滤波...
目录一、图像滤波1.1线性滤波器1.1.1均值滤波1.1.2高斯滤波1.2非线性滤波器1.2.1中值滤波器1.2.2双边滤波器1.3滤波器的Matlab代码实现二、图像边缘检测2.1一阶边缘检测算子2.1.1Sobel算子2.1.2Canny算子2.2二阶边缘检测算子2.2.1拉普拉斯算子2.3边缘检测的Matlab代码实现2.4边缘检测算法总结三、参考资料一、图像滤波图像滤波的主要目的就是在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制。图像滤波...
 目录1.Canny边缘检测理论1.1、高斯滤波1.2、Sobel算子计算梯度和方向1.3、非极大值抑制(定位准确的边缘同时可缩小边缘线宽)1.4、双阈值检测2.OpenCV之Canny边缘检测边缘检测一般是识别目标图像中亮度变化明显的像素点.因为显著变化的像素点通常反映了图像变化比较重要的地方.1.Canny边缘检测理论Canny是一种常用的边缘检测算法.其是在1986年JohnF.Canny提出的.Canny是一种multi-stage算法,分别如下:具体流...
目录1.Canny边缘检测理论1.1、高斯滤波1.2、Sobel算子计算梯度和方向1.3、非极大值抑制(定位准确的边缘同时可缩小边缘线宽)1.4、双阈值检测2.OpenCV之Canny边缘检测边缘检测一般是识别目标图像中亮度变化明显的像素点.因为显著变化的像素点通常反映了图像变化比较重要的地方.1.Canny边缘检测理论Canny是一种常用的边缘检测算法.其是在1986年JohnF.Canny提出的.Canny是一种multi-stage算法,分别如下:具体流...
 目录1.效果图2.源码补充:OpenCV-Python中Canny()参数这篇博客将介绍Canny边缘检测的概念,并利用cv2.Canny()实现边缘检测;Canny边缘检测是一种流行的边缘检测算法。它是由约翰F开发的,是一个多阶段的算法;Canny边缘检测大致包含4个步骤:降噪(使用高斯滤波去除高频噪声);计算边缘梯度和方向(SobelX、SobleY核在水平方向和垂直方向对平滑后的图像进行滤波,找到每个像素的边缘梯度和方向...
目录1.效果图2.源码补充:OpenCV-Python中Canny()参数这篇博客将介绍Canny边缘检测的概念,并利用cv2.Canny()实现边缘检测;Canny边缘检测是一种流行的边缘检测算法。它是由约翰F开发的,是一个多阶段的算法;Canny边缘检测大致包含4个步骤:降噪(使用高斯滤波去除高频噪声);计算边缘梯度和方向(SobelX、SobleY核在水平方向和垂直方向对平滑后的图像进行滤波,找到每个像素的边缘梯度和方向...
 这篇博客将介绍如何使用OpenCV和深度学习应用全面嵌套的边缘检测。并将对图像和视频流应用全面嵌套边缘检测,然后将结果与OpenCV的标准Canny边缘检测器进行比较。1.效果图愤怒的小鸟——原始图VSCanny边缘检测图VSHED边缘检测图花朵——原始图VSCanny边缘检测图VSHED边缘检测图视频效果图GIF如下2.全面嵌套边缘检测与Canny边缘检测2.1Hed与Canny边缘检测对比Holistically-NestedEdgeDetection(HED)全面嵌套边缘检...
这篇博客将介绍如何使用OpenCV和深度学习应用全面嵌套的边缘检测。并将对图像和视频流应用全面嵌套边缘检测,然后将结果与OpenCV的标准Canny边缘检测器进行比较。1.效果图愤怒的小鸟——原始图VSCanny边缘检测图VSHED边缘检测图花朵——原始图VSCanny边缘检测图VSHED边缘检测图视频效果图GIF如下2.全面嵌套边缘检测与Canny边缘检测2.1Hed与Canny边缘检测对比Holistically-NestedEdgeDetection(HED)全面嵌套边缘检...
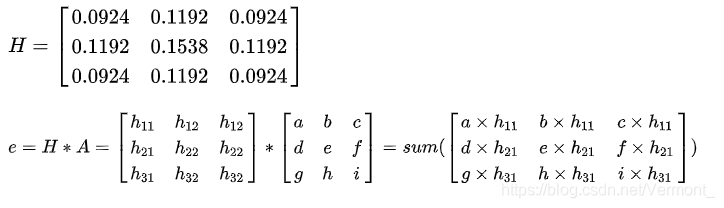
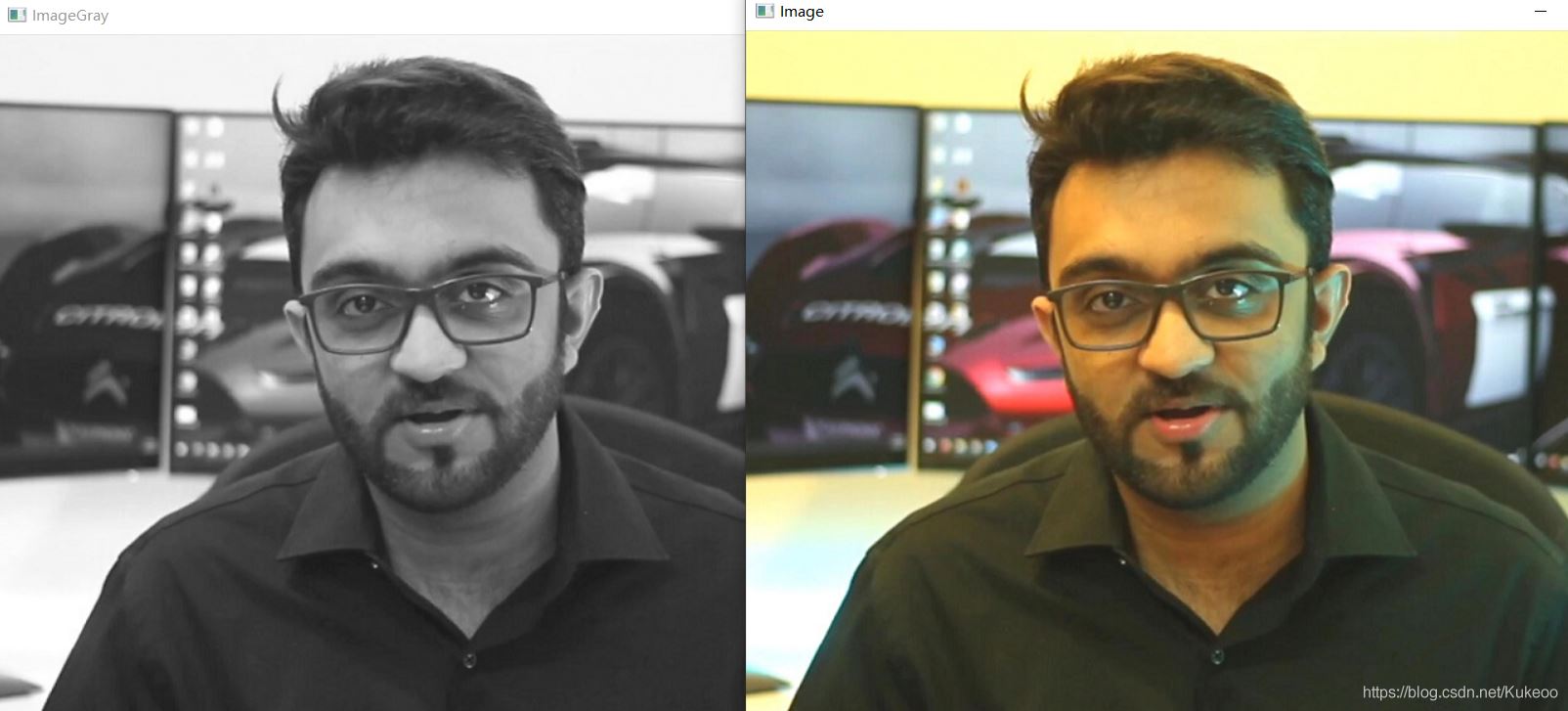 一、彩色图像转灰度Opencv提供了一个方法,可以使彩色图像变为灰度图像。函数名:cvtColor(src,dest,way);src表示初始的mat对象;dest表示转换后的mat对象;way表示以何种方式转换。举个例子:intmain(){//定义路径stringpath="Resources//test.png";//Mat:opencv引入的矩阵数据类型,处理所有图像Matimg=imread(path);//创建一个新的mat对象,用来存放转换后的灰度图像MatimgGray;//灰度转换函数cvtColor(img,im...
一、彩色图像转灰度Opencv提供了一个方法,可以使彩色图像变为灰度图像。函数名:cvtColor(src,dest,way);src表示初始的mat对象;dest表示转换后的mat对象;way表示以何种方式转换。举个例子:intmain(){//定义路径stringpath="Resources//test.png";//Mat:opencv引入的矩阵数据类型,处理所有图像Matimg=imread(path);//创建一个新的mat对象,用来存放转换后的灰度图像MatimgGray;//灰度转换函数cvtColor(img,im...
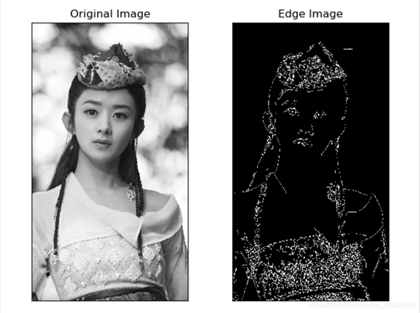
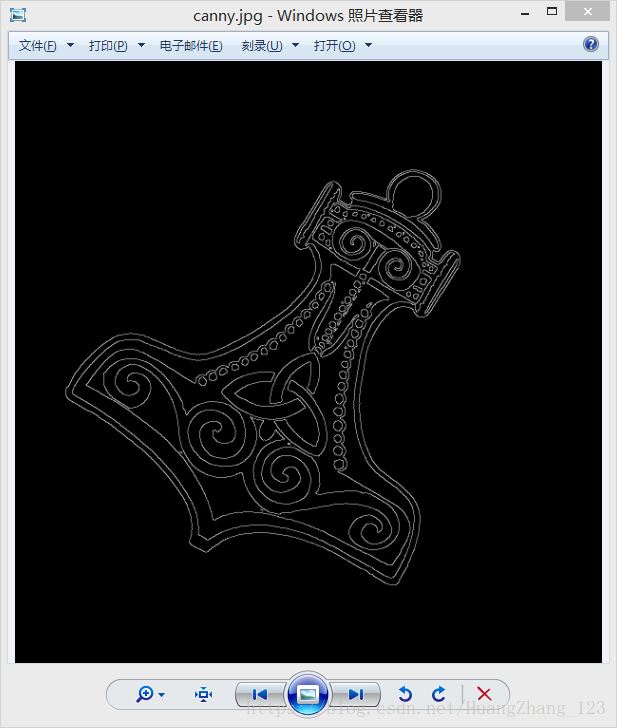 边缘检测Canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化。Canny边缘检测器算法基本步骤:平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声。计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直、水平和斜对角。这一步的输出用于在下一步中计算真正的边缘。非最大值抑制:利用上一步计算出来的梯度方向,...
边缘检测Canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化。Canny边缘检测器算法基本步骤:平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声。计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直、水平和斜对角。这一步的输出用于在下一步中计算真正的边缘。非最大值抑制:利用上一步计算出来的梯度方向,...