
2021
10-17
10-17
OpenCV中Canny边缘检测的实现
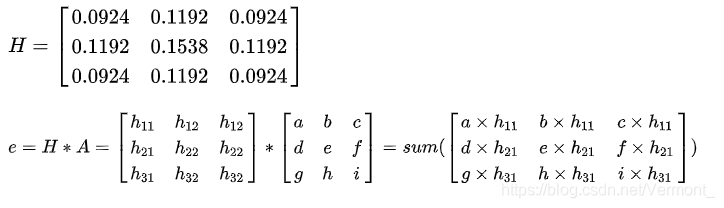 目录1.Canny边缘检测理论1.1、高斯滤波1.2、Sobel算子计算梯度和方向1.3、非极大值抑制(定位准确的边缘同时可缩小边缘线宽)1.4、双阈值检测2.OpenCV之Canny边缘检测边缘检测一般是识别目标图像中亮度变化明显的像素点.因为显著变化的像素点通常反映了图像变化比较重要的地方.1.Canny边缘检测理论Canny是一种常用的边缘检测算法.其是在1986年JohnF.Canny提出的.Canny是一种multi-stage算法,分别如下:具体流...
继续阅读 >
目录1.Canny边缘检测理论1.1、高斯滤波1.2、Sobel算子计算梯度和方向1.3、非极大值抑制(定位准确的边缘同时可缩小边缘线宽)1.4、双阈值检测2.OpenCV之Canny边缘检测边缘检测一般是识别目标图像中亮度变化明显的像素点.因为显著变化的像素点通常反映了图像变化比较重要的地方.1.Canny边缘检测理论Canny是一种常用的边缘检测算法.其是在1986年JohnF.Canny提出的.Canny是一种multi-stage算法,分别如下:具体流...
继续阅读 >
 图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波。我们知道微分运算是求信号的变化率,具有加强高频分量的作用。在空域运算中来说,对图像的锐化就是计算微分。对于数字图像的离散信号,微分运算就变成计算差分或梯度。图像处理中有多种边缘检测(梯度)算子,常用的包括普通一阶差分,Robert算子(交叉差分),Sobel算子等等,是基于寻找梯度强度。拉普拉斯算子(二阶差分)是基于过零点检测。通过计...
图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波。我们知道微分运算是求信号的变化率,具有加强高频分量的作用。在空域运算中来说,对图像的锐化就是计算微分。对于数字图像的离散信号,微分运算就变成计算差分或梯度。图像处理中有多种边缘检测(梯度)算子,常用的包括普通一阶差分,Robert算子(交叉差分),Sobel算子等等,是基于寻找梯度强度。拉普拉斯算子(二阶差分)是基于过零点检测。通过计...