
2021
09-22
09-22
详解PID控制器原理
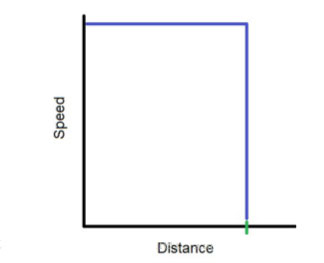 目录一、P-Proportional比例二、I-Integral积分三、D-Derivative导数四、调整常数项五、补充六、总结七、调试口诀八、具体方法一、P-Proportional比例想象一下一个全速行进的机器人,假设传感器上的值为1000。现在,由于它的速度和惯性,它可能会超过一点,当编写程序时,这可能是一个大麻烦,你想尽可能的准确。这个问题如图所示(x轴上的绿色标记代表理想距离):在理想世界中,您告诉机器人在哪里停止,它就停止在...
继续阅读 >
目录一、P-Proportional比例二、I-Integral积分三、D-Derivative导数四、调整常数项五、补充六、总结七、调试口诀八、具体方法一、P-Proportional比例想象一下一个全速行进的机器人,假设传感器上的值为1000。现在,由于它的速度和惯性,它可能会超过一点,当编写程序时,这可能是一个大麻烦,你想尽可能的准确。这个问题如图所示(x轴上的绿色标记代表理想距离):在理想世界中,您告诉机器人在哪里停止,它就停止在...
继续阅读 >