
2020
11-06
11-06
基于python模拟TCP3次握手连接及发送数据
源码如下fromscapy.allimport*importlogginglogging.getLogger('scapy.runtime').setLevel(logging.ERROR)target_ip='192.168.1.1'target_port=80data='GET/HTTP/1.0\r\n\r\n'defstart_tcp(target_ip,target_port):globalsport,s_seq,d_seq#主要是用于TCP3此握手建立连接后继续发送数据try:#第一次握手,发送SYN包ans=sr1(IP(dst=target_ip)/TCP(dport=target_port,sport=RandShort(),se...
继续阅读 >
 开篇必知必会在前一篇《基于TCP协议网络socket编程(java实现C/S通信)》,实际存在一个问题,如果服务器端在建立连接后发送多条信息给客户端,客户端是无法全部接收的,原因在于客户端为单线程,只接受了第一条信息,剩余信息阻塞等待下一次发送。所以,这造成了客户端无法处理消息队列,每次只接收并输出一条服务器信息,出现信息不同步问题。本篇将解决这个问题,详细记录实现java多线程通信,目标是使客户端可以一次接收服务器...
开篇必知必会在前一篇《基于TCP协议网络socket编程(java实现C/S通信)》,实际存在一个问题,如果服务器端在建立连接后发送多条信息给客户端,客户端是无法全部接收的,原因在于客户端为单线程,只接受了第一条信息,剩余信息阻塞等待下一次发送。所以,这造成了客户端无法处理消息队列,每次只接收并输出一条服务器信息,出现信息不同步问题。本篇将解决这个问题,详细记录实现java多线程通信,目标是使客户端可以一次接收服务器...
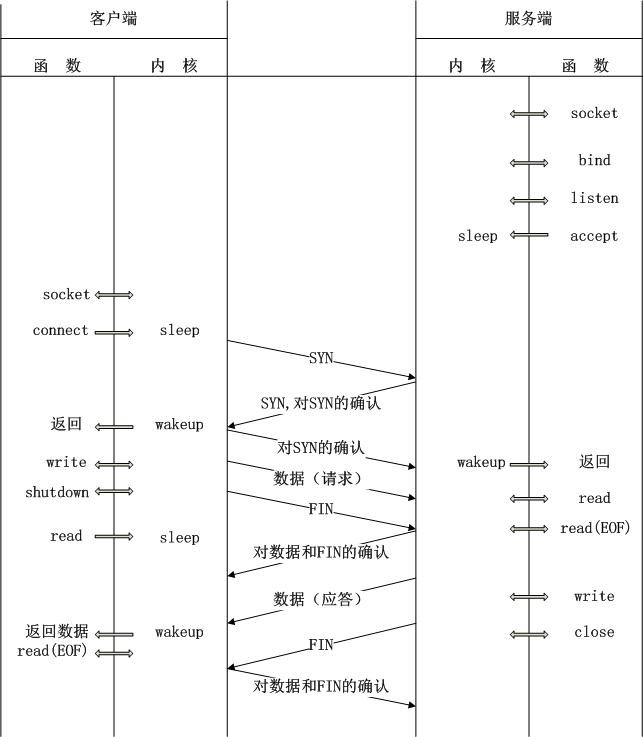
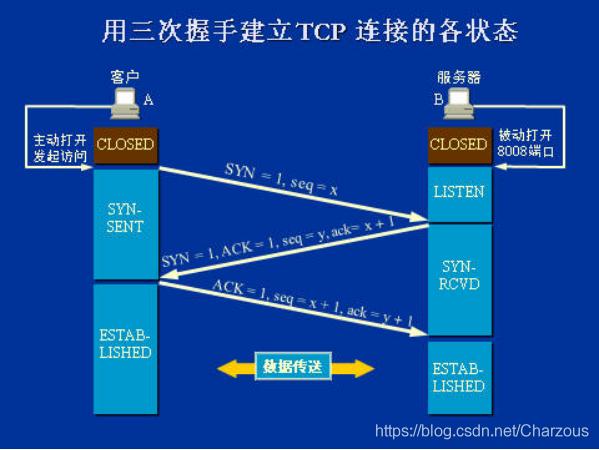 一、前言:TCP原理简介首先,保证文章完整性,TCP的理论原理还是需要简介一下,略显枯燥๑?^◡?^๑。TCP(传输控制协议,TransmissionControlProtocol)是一种面向连接的、可靠的、基于字节流的传输层通信协议。TCP旨在适应支持多网络应用的分层协议层次结构。也就是说,TCP是为了在不可靠的互联网络上提供可靠的端到端字节流而专门设计的一个传输协议。连接到不同但互连的计算机通信网络的主计算机中的成对进程...
一、前言:TCP原理简介首先,保证文章完整性,TCP的理论原理还是需要简介一下,略显枯燥๑?^◡?^๑。TCP(传输控制协议,TransmissionControlProtocol)是一种面向连接的、可靠的、基于字节流的传输层通信协议。TCP旨在适应支持多网络应用的分层协议层次结构。也就是说,TCP是为了在不可靠的互联网络上提供可靠的端到端字节流而专门设计的一个传输协议。连接到不同但互连的计算机通信网络的主计算机中的成对进程...
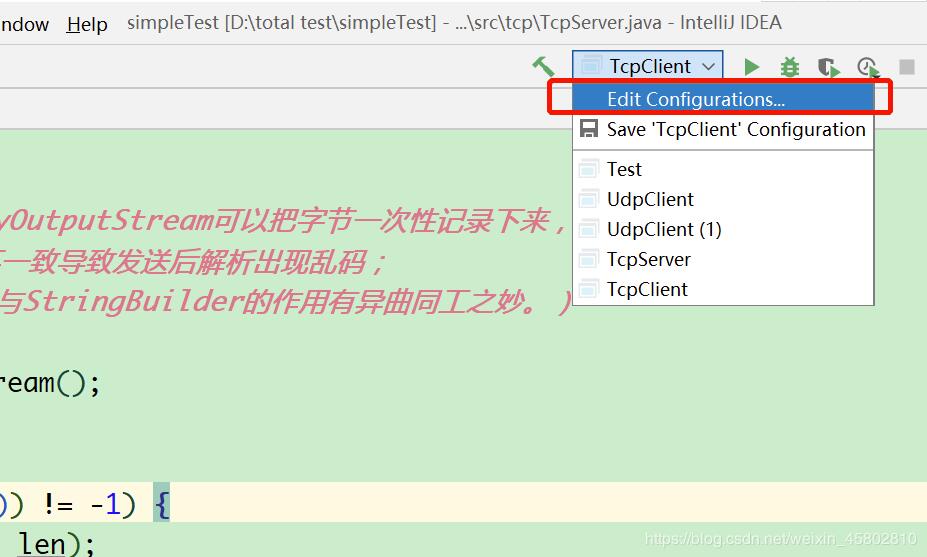 本文实例为大家分享了Java实现TCP互发消息的具体代码,供大家参考,具体内容如下TCP客户端:packagetcp;importjava.io.IOException;importjava.io.OutputStream;importjava.net.InetAddress;importjava.net.Socket;publicclassTcpClient{publicstaticvoidmain(String[]args){Socketsocket=null;OutputStreamos=null;try{//创建socket对象,指明服务器端的ip和端口号InetAddressinet...
本文实例为大家分享了Java实现TCP互发消息的具体代码,供大家参考,具体内容如下TCP客户端:packagetcp;importjava.io.IOException;importjava.io.OutputStream;importjava.net.InetAddress;importjava.net.Socket;publicclassTcpClient{publicstaticvoidmain(String[]args){Socketsocket=null;OutputStreamos=null;try{//创建socket对象,指明服务器端的ip和端口号InetAddressinet...
 前几天已经讲过了UDP协议下大文件传输的python实现代码,今天再实现TCP协议下大文件传输的python实现代码。TCP和UDP的实现过程还是比较不一样的。实现代码:服务端:importsocketimporttimes=socket.socket(socket.AF_INET,socket.SOCK_STREAM)s.bind(('127.0.0.1',9999))s.listen(5)print('Waitingforconnection...')whileTrue:sock,addr=s.accept()print('Acceptnewconnectionfrom%s:%s...'%addr)ifcount==...
前几天已经讲过了UDP协议下大文件传输的python实现代码,今天再实现TCP协议下大文件传输的python实现代码。TCP和UDP的实现过程还是比较不一样的。实现代码:服务端:importsocketimporttimes=socket.socket(socket.AF_INET,socket.SOCK_STREAM)s.bind(('127.0.0.1',9999))s.listen(5)print('Waitingforconnection...')whileTrue:sock,addr=s.accept()print('Acceptnewconnectionfrom%s:%s...'%addr)ifcount==...
 一、网站即时消息(WebIM)如何实现消息推送网站即时消息(WebIM)通常有三种方式实现推送通道:1)WebSocket2)FlashSocket3)http轮询其中1)和2)是用Tcp长连接实现的,其消息的实时性可以通过tcp保证。方案3)才算是webim实现消息推送的“正统”方案,用http短连接轮询的方式实现“伪长连接”,既然是轮询,有朋友就对消息的实时性产生了质疑。本文要解答,webim使用http长轮询如何保证消息的绝对实时性。二、人们为什么会...
一、网站即时消息(WebIM)如何实现消息推送网站即时消息(WebIM)通常有三种方式实现推送通道:1)WebSocket2)FlashSocket3)http轮询其中1)和2)是用Tcp长连接实现的,其消息的实时性可以通过tcp保证。方案3)才算是webim实现消息推送的“正统”方案,用http短连接轮询的方式实现“伪长连接”,既然是轮询,有朋友就对消息的实时性产生了质疑。本文要解答,webim使用http长轮询如何保证消息的绝对实时性。二、人们为什么会...
 这两天搭建了一组Apache服务器,每台服务器4G内存,采用的是prefork模式,一开始设置的连接数太少了,需要较长的时间去响应用户的请求,后来修改了一下Apache2.0.59的配置文件httpd.conf:#preforkMPM#StartServers:numberofserverprocessestostart#MinSpareServers:minimumnumberofserverprocesseswhicharekeptspare#MaxSpareServers:maximumnumberofserverprocesseswhicharekeptspare#MaxClient...
这两天搭建了一组Apache服务器,每台服务器4G内存,采用的是prefork模式,一开始设置的连接数太少了,需要较长的时间去响应用户的请求,后来修改了一下Apache2.0.59的配置文件httpd.conf:#preforkMPM#StartServers:numberofserverprocessestostart#MinSpareServers:minimumnumberofserverprocesseswhicharekeptspare#MaxSpareServers:maximumnumberofserverprocesseswhicharekeptspare#MaxClient...
 CGI全称是“通用网关接口”(CommonGatewayInterface),它可以让一个客户端,从网页浏览器向执行在Web服务器上的程序请求数据。CGI描述了客户端和这个程序之间传输数据的一种标准。CGI的一个目的是要独立于任何语言的,所以CGI可以用任何一种语言编写,只要这种语言具有标准输入、输出和环境变量。如php,perl,tcl等。FastCGI是Web服务器和处理程序之间通信的一种协议,是CGI的一种改进方案,FastCGI像是一个常驻(long-li...
CGI全称是“通用网关接口”(CommonGatewayInterface),它可以让一个客户端,从网页浏览器向执行在Web服务器上的程序请求数据。CGI描述了客户端和这个程序之间传输数据的一种标准。CGI的一个目的是要独立于任何语言的,所以CGI可以用任何一种语言编写,只要这种语言具有标准输入、输出和环境变量。如php,perl,tcl等。FastCGI是Web服务器和处理程序之间通信的一种协议,是CGI的一种改进方案,FastCGI像是一个常驻(long-li...