
2020
11-29
11-29
基于python的opencv图像处理实现对斑马线的检测示例
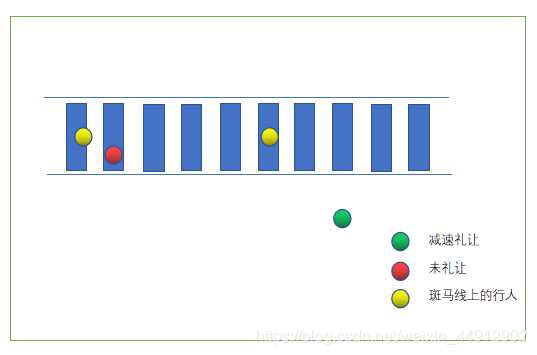 基本思路斑马线检测通过opencv图像处理来进行灰度值转换、高斯滤波去噪、阈值处理、腐蚀和膨胀后对图像进行轮廓检测,通过判断车辆和行人的位置,以及他们之间的距离信息,当车速到超过一定阈值时并且与行人距离较近时,则会被判定车辆为未礼让行人。结果示例实验流程先通过视频截取一张图片来进行测试,如果结果满意之后再嵌套到视频中,从而达到想要的效果。1.预处理(灰度值转换、高斯滤波去噪、阈值处理、腐蚀和膨胀)>根据自...
继续阅读 >
基本思路斑马线检测通过opencv图像处理来进行灰度值转换、高斯滤波去噪、阈值处理、腐蚀和膨胀后对图像进行轮廓检测,通过判断车辆和行人的位置,以及他们之间的距离信息,当车速到超过一定阈值时并且与行人距离较近时,则会被判定车辆为未礼让行人。结果示例实验流程先通过视频截取一张图片来进行测试,如果结果满意之后再嵌套到视频中,从而达到想要的效果。1.预处理(灰度值转换、高斯滤波去噪、阈值处理、腐蚀和膨胀)>根据自...
继续阅读 >
 最近开始接触C++了,就拿一个OpenCV小项目来练练手。在车牌自动识别系统中,从汽车图像的获取到车牌字符处理是一个复杂的过程,本文就以一个简单的方法来处理车牌定位。我国的汽车牌照一般由七个字符和一个点组成,车牌字符的高度和宽度是固定的,分别为90mm和45mm,七个字符之间的距离也是固定的12mm,点分割符的直径是10mm。使用的图片是从百度上随便找的(侵删),展示一下原图和灰度图:#include<iostream>#include<ope...
最近开始接触C++了,就拿一个OpenCV小项目来练练手。在车牌自动识别系统中,从汽车图像的获取到车牌字符处理是一个复杂的过程,本文就以一个简单的方法来处理车牌定位。我国的汽车牌照一般由七个字符和一个点组成,车牌字符的高度和宽度是固定的,分别为90mm和45mm,七个字符之间的距离也是固定的12mm,点分割符的直径是10mm。使用的图片是从百度上随便找的(侵删),展示一下原图和灰度图:#include<iostream>#include<ope...
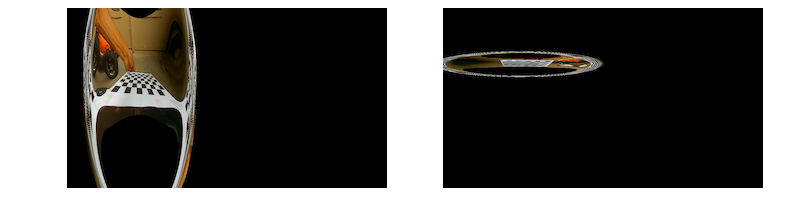 01.简介当我们使用的鱼眼镜头视角大于160°时,OpenCV中用于校准镜头“经典”方法的效果可能就不是和理想了。即使我们仔细遵循OpenCV文档中的步骤,也可能会得到下面这个奇奇怪怪的照片:如果小伙伴也遇到了类似情况,那么这篇文章可能会对大家有一定的帮助。从3.0版开始,OpenCV包含了cv2.fisheye可以很好地处理鱼眼镜头校准的软件包。但是,该模块没有针对读者的相关的教程。02.相机参数获取校准镜头其实只需要下面2个步骤。利...
01.简介当我们使用的鱼眼镜头视角大于160°时,OpenCV中用于校准镜头“经典”方法的效果可能就不是和理想了。即使我们仔细遵循OpenCV文档中的步骤,也可能会得到下面这个奇奇怪怪的照片:如果小伙伴也遇到了类似情况,那么这篇文章可能会对大家有一定的帮助。从3.0版开始,OpenCV包含了cv2.fisheye可以很好地处理鱼眼镜头校准的软件包。但是,该模块没有针对读者的相关的教程。02.相机参数获取校准镜头其实只需要下面2个步骤。利...
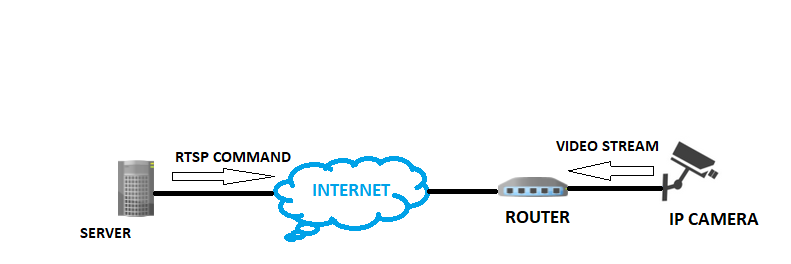 很多小伙伴都不会在家里或者办公室安装网络摄像头或监视摄像头。但是有时,大家又希望能够随时随地观看视频直播。大多数人会选择使用IP摄像机(Internet协议摄像机)而不是CCTV(闭路电视),因为它们具有更高的分辨率并降低了布线成本。在本文中,我们将重点介绍IP摄像机。IP摄像机是一种数字 摄像机,可以通过IP网络接收控制数据并发送图像数据,并且不需要本地记录设备。大多数IP摄像机都是基于RTSP(实时流协议)的,因此...
很多小伙伴都不会在家里或者办公室安装网络摄像头或监视摄像头。但是有时,大家又希望能够随时随地观看视频直播。大多数人会选择使用IP摄像机(Internet协议摄像机)而不是CCTV(闭路电视),因为它们具有更高的分辨率并降低了布线成本。在本文中,我们将重点介绍IP摄像机。IP摄像机是一种数字 摄像机,可以通过IP网络接收控制数据并发送图像数据,并且不需要本地记录设备。大多数IP摄像机都是基于RTSP(实时流协议)的,因此...
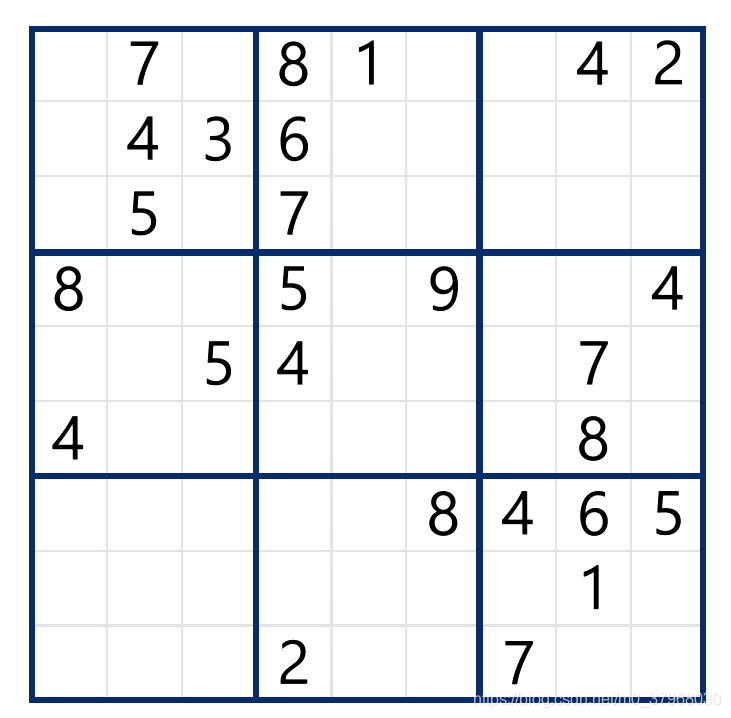 Python-opencv+KNN求解数独最近一直在玩数独,突发奇想实现图像识别求解数独,输入到输出平均需要0.5s。整体思路大概就是识别出图中数字生成list,然后求解。输入输出demo数独采用的是微软自带的Microsoftsudoku软件随便截取的图像,如下图所示:经过程序求解后,得到的结果如下图所示:程序具体流程程序整体流程如下图所示:读入图像后,根据求解轮廓信息找到数字所在位置,以及不包含数字的空白位置,提取数字信息通过KNN识别,...
Python-opencv+KNN求解数独最近一直在玩数独,突发奇想实现图像识别求解数独,输入到输出平均需要0.5s。整体思路大概就是识别出图中数字生成list,然后求解。输入输出demo数独采用的是微软自带的Microsoftsudoku软件随便截取的图像,如下图所示:经过程序求解后,得到的结果如下图所示:程序具体流程程序整体流程如下图所示:读入图像后,根据求解轮廓信息找到数字所在位置,以及不包含数字的空白位置,提取数字信息通过KNN识别,...
 本期我们将展示一种对路面类型和质量进行分类的方法及其步骤。为了测试这种方法,我们使用了我们制作的RTK数据集。路面分类该数据集[1]包含用低成本相机拍摄的图像,以及新兴国家常见的场景,其中包含未铺砌的道路和坑洼。路面类型是有关人或自动驾驶车辆应如何驾驶的重要信息。除了乘客舒适度和车辆维护以外,它还涉及每个人的安全。我们可以通过[2]中的简单卷积神经网络(CNN)结构来实现。在这种方法中,我们对表面类型分类任务...
本期我们将展示一种对路面类型和质量进行分类的方法及其步骤。为了测试这种方法,我们使用了我们制作的RTK数据集。路面分类该数据集[1]包含用低成本相机拍摄的图像,以及新兴国家常见的场景,其中包含未铺砌的道路和坑洼。路面类型是有关人或自动驾驶车辆应如何驾驶的重要信息。除了乘客舒适度和车辆维护以外,它还涉及每个人的安全。我们可以通过[2]中的简单卷积神经网络(CNN)结构来实现。在这种方法中,我们对表面类型分类任务...
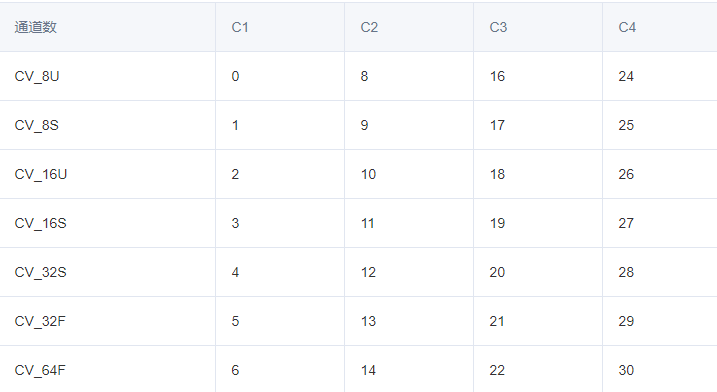 cv::Mat图像格式(DataType)命名规则通用的参数命名格式为:CV_{元素比特数}{元素类型}C{通道数}1最常见的CV_8UC3就表示为3通道Unsigned8bits格式的矩阵8U:8bitunsignedC3:通道数为32有些图片存储格式是32位float,则对应的图像格式为:CV_32FC1,CV_32FC2,CV_32FC3等;3如果图片存储格式是64位double,则对应的图像格式为:CV_64FC1,CV_64FC2,CV_64FC3等。int值映射关系矩阵元素的数据类型也可用不同的i...
cv::Mat图像格式(DataType)命名规则通用的参数命名格式为:CV_{元素比特数}{元素类型}C{通道数}1最常见的CV_8UC3就表示为3通道Unsigned8bits格式的矩阵8U:8bitunsignedC3:通道数为32有些图片存储格式是32位float,则对应的图像格式为:CV_32FC1,CV_32FC2,CV_32FC3等;3如果图片存储格式是64位double,则对应的图像格式为:CV_64FC1,CV_64FC2,CV_64FC3等。int值映射关系矩阵元素的数据类型也可用不同的i...
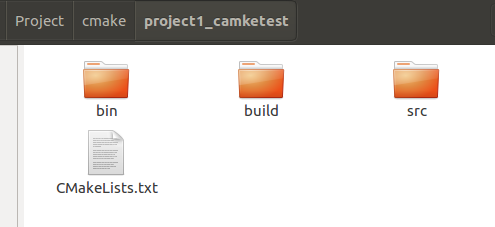 项目结构为了使整个项目更加条理,我们的文件夹采用如下组织方式:binbuildCMakeLists.txtsrc其中bin目录用于放编译生成的可执行文件,build目录用于cmake构建项目,src用于放源代码。OpenCV源文件下面是我们写的一个OpenCV示例代码:#include<opencv2/core/core.hpp>#include<opencv2/highgui/highgui.hpp>#include<opencv2/imgproc/imgproc.hpp>#include<iostream>usingnamespacestd;usingnamespacecv;intmain(intar...
项目结构为了使整个项目更加条理,我们的文件夹采用如下组织方式:binbuildCMakeLists.txtsrc其中bin目录用于放编译生成的可执行文件,build目录用于cmake构建项目,src用于放源代码。OpenCV源文件下面是我们写的一个OpenCV示例代码:#include<opencv2/core/core.hpp>#include<opencv2/highgui/highgui.hpp>#include<opencv2/imgproc/imgproc.hpp>#include<iostream>usingnamespacestd;usingnamespacecv;intmain(intar...
 本篇博文分享一篇寻找图像中灯光亮点(图像中最亮点)的教程,例如,检测图像中五个灯光的亮点并标记,项目效果如下所示:第1步:导入并打开原图像,实现代码如下所示:#importthenecessarypackagesfromimutilsimportcontoursfromskimageimportmeasureimportnumpyasnpimportargparseimportimutilsimportcv2#constructtheargumentparseandparsetheargumentsap=argparse.ArgumentParser()ap.add_argument(...
本篇博文分享一篇寻找图像中灯光亮点(图像中最亮点)的教程,例如,检测图像中五个灯光的亮点并标记,项目效果如下所示:第1步:导入并打开原图像,实现代码如下所示:#importthenecessarypackagesfromimutilsimportcontoursfromskimageimportmeasureimportnumpyasnpimportargparseimportimutilsimportcv2#constructtheargumentparseandparsetheargumentsap=argparse.ArgumentParser()ap.add_argument(...