
2020
10-08
10-08
opencv 形态学变换(开运算,闭运算,梯度运算)
 形态学里把腐蚀和膨胀单独拿了出来,其他操作(保括膨胀和腐蚀的组合操作)都叫形态学变换。opencv里有包:cv2.morphologyEx()morphology:译文形态学使用python+opencv讲解开运算开运算:对图像先进行腐蚀,然后对腐蚀后的图进行膨胀morphologyEx运算结果=cv2.morphologyEx(源图像img,cv2.MORPH_OPEN,卷积核k)cv2.MORPH_OPEN:开运算importcv2importnumpyasnpo=cv2.imread("opening.bmp",cv2.IMREAD_UNCHANGED)k=np.ones((1...
继续阅读 >
形态学里把腐蚀和膨胀单独拿了出来,其他操作(保括膨胀和腐蚀的组合操作)都叫形态学变换。opencv里有包:cv2.morphologyEx()morphology:译文形态学使用python+opencv讲解开运算开运算:对图像先进行腐蚀,然后对腐蚀后的图进行膨胀morphologyEx运算结果=cv2.morphologyEx(源图像img,cv2.MORPH_OPEN,卷积核k)cv2.MORPH_OPEN:开运算importcv2importnumpyasnpo=cv2.imread("opening.bmp",cv2.IMREAD_UNCHANGED)k=np.ones((1...
继续阅读 >
 语言:python+opencv为什么使用图像腐蚀和图像膨胀如图,使用图像腐蚀进行去噪,但是为压缩噪声。对腐蚀过的图像,进行膨胀处理,可以去除噪声,并保持原样形状。图像腐蚀腐蚀主要针对的是二值图像,如只有0和1两个值,两个输入对象:1原始二值图像,2卷积核使用卷积核遍历原始二值图像,如果卷积核对应的元素值均为1,其值才为1,否则为0。如图,红色为卷积核。腐蚀后的结果示意图见下面,效果是将边缘抹掉一部分。使用方法:erod...
语言:python+opencv为什么使用图像腐蚀和图像膨胀如图,使用图像腐蚀进行去噪,但是为压缩噪声。对腐蚀过的图像,进行膨胀处理,可以去除噪声,并保持原样形状。图像腐蚀腐蚀主要针对的是二值图像,如只有0和1两个值,两个输入对象:1原始二值图像,2卷积核使用卷积核遍历原始二值图像,如果卷积核对应的元素值均为1,其值才为1,否则为0。如图,红色为卷积核。腐蚀后的结果示意图见下面,效果是将边缘抹掉一部分。使用方法:erod...
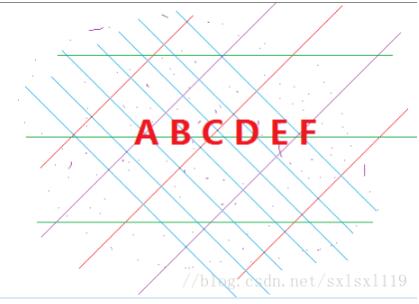 原图代码src=cv2.imread("28.png")gray_src=cv2.cvtColor(src,cv2.COLOR_BGR2GRAY)#cv2.imshow("inputimage",src)#cv2.imshow("grayimage",gray_src)#cv2.waitKey(0)gray_src=cv2.bitwise_not(gray_src)#二值化binary_src=cv2.adaptiveThreshold(gray_src,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,15,-2)cv2.namedWindow("resultimage",cv2.WINDOW_AUTOSIZE)cv2.imshow("result...
原图代码src=cv2.imread("28.png")gray_src=cv2.cvtColor(src,cv2.COLOR_BGR2GRAY)#cv2.imshow("inputimage",src)#cv2.imshow("grayimage",gray_src)#cv2.waitKey(0)gray_src=cv2.bitwise_not(gray_src)#二值化binary_src=cv2.adaptiveThreshold(gray_src,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,15,-2)cv2.namedWindow("resultimage",cv2.WINDOW_AUTOSIZE)cv2.imshow("result...
 这是后期补充的部分,和前期的代码不太一样效果图源代码//测试voidCCutImageVS2013Dlg::OnBnClickedTestButton1(){vector<vector<Point>>contours;//轮廓数组vector<Point2d>centers;//轮廓质心坐标vector<vector<Point>>::iteratoritr;//轮廓迭代器vector<Point2d>::iteratoritrc;//质心坐标迭代器vector<vector<Point>>con;//当前轮廓doublearea;doubleminarea=1000;doublemaxarea=0;Mome...
这是后期补充的部分,和前期的代码不太一样效果图源代码//测试voidCCutImageVS2013Dlg::OnBnClickedTestButton1(){vector<vector<Point>>contours;//轮廓数组vector<Point2d>centers;//轮廓质心坐标vector<vector<Point>>::iteratoritr;//轮廓迭代器vector<Point2d>::iteratoritrc;//质心坐标迭代器vector<vector<Point>>con;//当前轮廓doublearea;doubleminarea=1000;doublemaxarea=0;Mome...
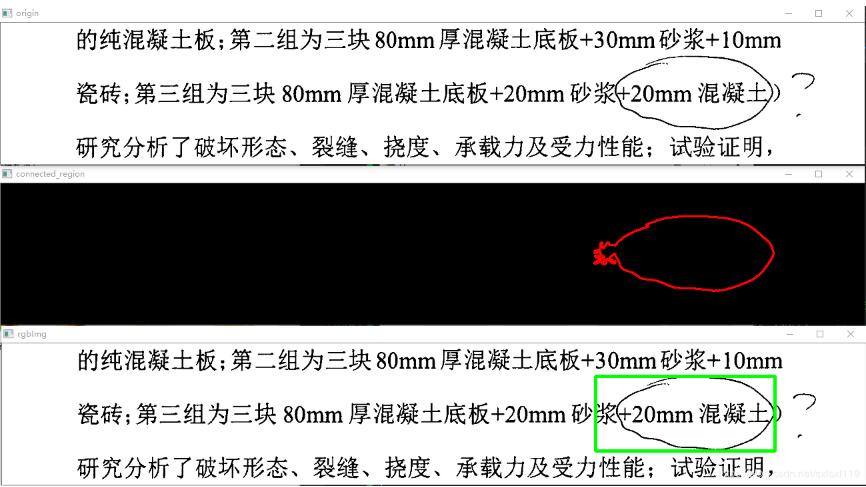
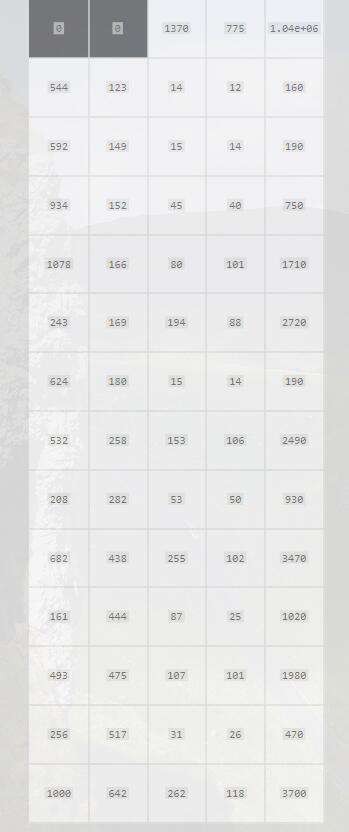 主要内容:对比新旧函数,用于过滤原始图像中轮廓分析后较小的区域,留下较大区域。关键字:connectedComponentsWithStats在以前,常用的方法是”是先调用cv::findContours()函数(传入cv::RETR_CCOMP标志),随后在得到的连通区域上循环调用cv::drawContours()“比如,我在GOCVHelper中这样进行了实现//寻找最大的轮廓VPFindBigestContour(Matsrc){intimax=0;//代表最大轮廓的序号intimaxcontour=-1;//代表...
主要内容:对比新旧函数,用于过滤原始图像中轮廓分析后较小的区域,留下较大区域。关键字:connectedComponentsWithStats在以前,常用的方法是”是先调用cv::findContours()函数(传入cv::RETR_CCOMP标志),随后在得到的连通区域上循环调用cv::drawContours()“比如,我在GOCVHelper中这样进行了实现//寻找最大的轮廓VPFindBigestContour(Matsrc){intimax=0;//代表最大轮廓的序号intimaxcontour=-1;//代表...
 之前一直使用Skimage中的形态学处理来进行孤立小区域的去除,代码如下img=morphology.remove_small_objects(img,size)img=morphology.remove_small_holes(img,size)后面需要将相应算法翻译到C++环境中,而Skimage没有对应的C++版本,为了确保python算法和C++算法结果的一致性,需要进行迁移,因而打算使用OpenCV来重写去除孤立小区域的代码。代码如下:_,binary=cv2.threshold(img,0.1,1,cv2.THRESH_BINARY)image,contou...
之前一直使用Skimage中的形态学处理来进行孤立小区域的去除,代码如下img=morphology.remove_small_objects(img,size)img=morphology.remove_small_holes(img,size)后面需要将相应算法翻译到C++环境中,而Skimage没有对应的C++版本,为了确保python算法和C++算法结果的一致性,需要进行迁移,因而打算使用OpenCV来重写去除孤立小区域的代码。代码如下:_,binary=cv2.threshold(img,0.1,1,cv2.THRESH_BINARY)image,contou...
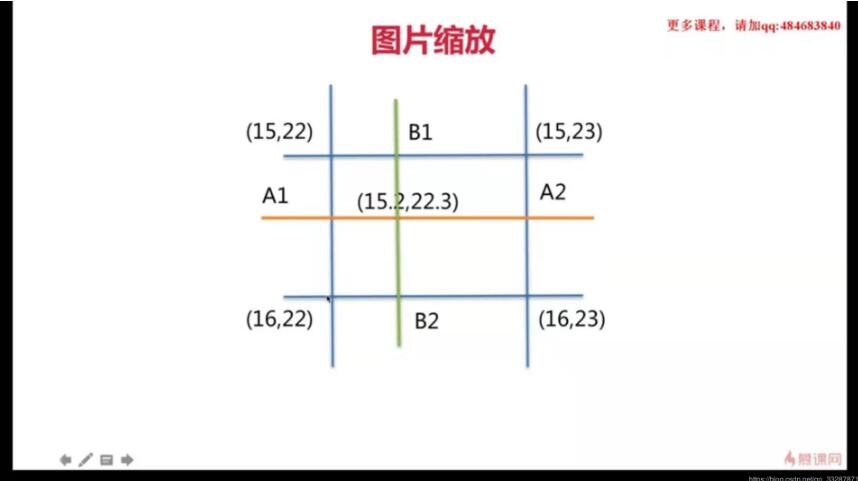 如下所示:defresize(src,dsize,dst=None,fx=None,fy=None,interpolation=None):如果使用vanillaresize,不改变默认参数,就会对原图像进行插值操作。不关你是扩大还是缩小图片,都会通过插值产生新的像素值。对于语义分割,target的处理,如果是对他进行resize操作的话。就希望不产生新的像素值,因为他的颜色信息,代表了像素的类别信息。但是我们有时候希望resize之后不产生新的像素值,而是产生利用最近邻点的像素值作...
如下所示:defresize(src,dsize,dst=None,fx=None,fy=None,interpolation=None):如果使用vanillaresize,不改变默认参数,就会对原图像进行插值操作。不关你是扩大还是缩小图片,都会通过插值产生新的像素值。对于语义分割,target的处理,如果是对他进行resize操作的话。就希望不产生新的像素值,因为他的颜色信息,代表了像素的类别信息。但是我们有时候希望resize之后不产生新的像素值,而是产生利用最近邻点的像素值作...
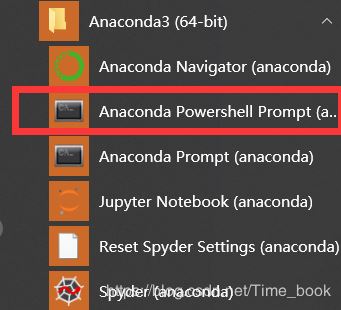 一、dlib以及opencv-python库安装介于我使用的是jupyternotebook,所以在安装dlib和opencv-python时是在这个命令行安装的dlib安装方法:1.若可以,直接使用上图所示命令行输入以下命令:pipinstallcmakepipinstallboostpipinstalldlib若安装了visualstudio2019应该就可以直接pipinstalldlib,至少我是这样由于很多在执行第三句时都会报错,所以这里提供第二种办法2.去dlib官网:http://dlib.net/或者https://github.co...
一、dlib以及opencv-python库安装介于我使用的是jupyternotebook,所以在安装dlib和opencv-python时是在这个命令行安装的dlib安装方法:1.若可以,直接使用上图所示命令行输入以下命令:pipinstallcmakepipinstallboostpipinstalldlib若安装了visualstudio2019应该就可以直接pipinstalldlib,至少我是这样由于很多在执行第三句时都会报错,所以这里提供第二种办法2.去dlib官网:http://dlib.net/或者https://github.co...
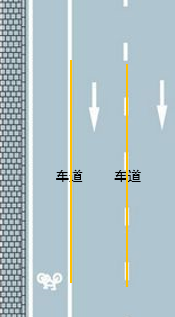 项目介绍下图中的两条线即为车道:我们的任务就是通过OpenCV在一段视频(或摄像头)中实时检测出车道并将其标记出来。其效果如下图所示:这里使用的代码来源于磐怼怼大神,此文章旨在对其代码进行解释。实现步骤1、将视频的所有帧读取为图片;2、创建掩码并应用到这些图片上;3、图像阈值化;4、用霍夫线变换检测车道;5、将车道画到每张图片上;6、将所有图片合并为视频。代码实现1、导入需要的库importosimportreimportcv2i...
项目介绍下图中的两条线即为车道:我们的任务就是通过OpenCV在一段视频(或摄像头)中实时检测出车道并将其标记出来。其效果如下图所示:这里使用的代码来源于磐怼怼大神,此文章旨在对其代码进行解释。实现步骤1、将视频的所有帧读取为图片;2、创建掩码并应用到这些图片上;3、图像阈值化;4、用霍夫线变换检测车道;5、将车道画到每张图片上;6、将所有图片合并为视频。代码实现1、导入需要的库importosimportreimportcv2i...
 如图,这次需要在图片中找到卷尺的红色刻度,所以需要对图像做过滤,只留下红色部分。一开始的想法是分别找到RGB值,然后找到红色区域的部分保留就可以了,不过好像很难确定红色区域的RGB取值范围,所以要把图片转化到HSV空间中去。在opencv中直接使用cvCvtColor函数就可以啦。IplImage*hsv=cvCreateImage(cvGetSize(image),8,3);cvCvtColor(image,hsv,CV_BGR2HSV);opencv的H范围是0~180,红色的H范围大概是(0~8)∪(160,18...
如图,这次需要在图片中找到卷尺的红色刻度,所以需要对图像做过滤,只留下红色部分。一开始的想法是分别找到RGB值,然后找到红色区域的部分保留就可以了,不过好像很难确定红色区域的RGB取值范围,所以要把图片转化到HSV空间中去。在opencv中直接使用cvCvtColor函数就可以啦。IplImage*hsv=cvCreateImage(cvGetSize(image),8,3);cvCvtColor(image,hsv,CV_BGR2HSV);opencv的H范围是0~180,红色的H范围大概是(0~8)∪(160,18...
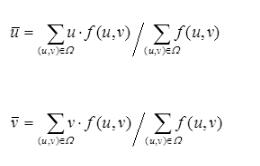 我们有时候需要求取某一个物体重心,这里一般将图像二值化,得出该物体的轮廓,然后根据灰度重心法,计算出每一个物体的中心。步骤如下:1)合适的阈值二值化2)求取轮廓3)计算重心otsu算法求取最佳阈值otsu法(最大类间方差法,有时也称之为大津算法)使用的是聚类的思想,把图像的灰度数按灰度级分成2个部分,使得两个部分之间的灰度值差异最大,每个部分之间的灰度差异最小,通过方差的计算来寻找一个合适的灰度级别来划分,ot...
我们有时候需要求取某一个物体重心,这里一般将图像二值化,得出该物体的轮廓,然后根据灰度重心法,计算出每一个物体的中心。步骤如下:1)合适的阈值二值化2)求取轮廓3)计算重心otsu算法求取最佳阈值otsu法(最大类间方差法,有时也称之为大津算法)使用的是聚类的思想,把图像的灰度数按灰度级分成2个部分,使得两个部分之间的灰度值差异最大,每个部分之间的灰度差异最小,通过方差的计算来寻找一个合适的灰度级别来划分,ot...
 一,原图和效果图二,代码//#########################产生随机颜色#########################cv::ScalaricvprGetRandomColor(){ucharr=255*(rand()/(1.0+RAND_MAX));ucharg=255*(rand()/(1.0+RAND_MAX));ucharb=255*(rand()/(1.0+RAND_MAX));returncv::Scalar(b,g,r);}//#########################产生随机颜色#########################//########################种子填充法)#############...
一,原图和效果图二,代码//#########################产生随机颜色#########################cv::ScalaricvprGetRandomColor(){ucharr=255*(rand()/(1.0+RAND_MAX));ucharg=255*(rand()/(1.0+RAND_MAX));ucharb=255*(rand()/(1.0+RAND_MAX));returncv::Scalar(b,g,r);}//#########################产生随机颜色#########################//########################种子填充法)#############...